7 月 19 日消息,理想汽车今日发布“智能驾驶产品经理的一封信”,理想汽车智能驾驶的产品经理朱厚强谈到了公布智能驾驶注意事项。
朱厚强表示:
智能驾驶正处在发展期,产品体验的提升大家有目共睹,但我们不得不承认它仍然不够完美,至少在某些复杂的交通状况下,它和人类老司机还有一些差距,还不能把车辆控制完全放手交给“硅基生物”。根据研发测试复盘和体验用户的反馈,我们整理了一些复杂场景,提醒大家这些情况下车辆有可能表现不符合预期,务必要保持注意力并及时接管。
整理如下:
路口与汇流场景
1. 路口横穿抢行场景,建议提前留意,做好防御性规避准备。
-
车辆:对向左转车辆、掉头车辆,可能抢行插入自车直行轨迹,增加了系统应对难度。
-
非机动车:路口内斜插、横向闯灯、从旁侧车后盲区窜出的两 / 三轮车等,都是路口范围极不确定的风险因素。
-
行人:从旁侧大车盲区内窜出、奔跑状态、通行后折返等随机行为,需随时做好刹车避让准备。
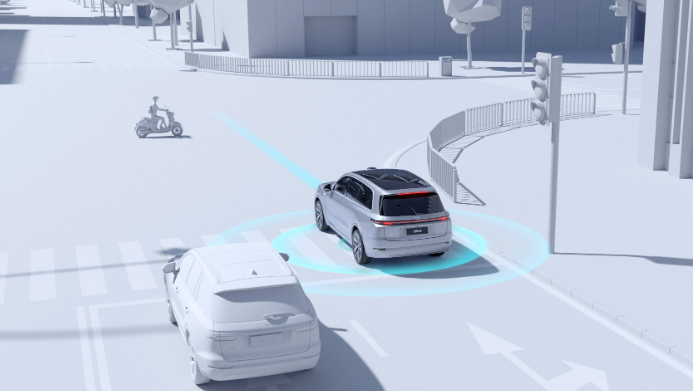
2. 无保护左转,是对博弈能力挑战极高的典型场景,遇到激进的其他车辆时系统需要时间响应,尤其在转弯通过对向大车时,需注意大车后方的快速直行来车,避免在自车转弯期间发生冲撞。

3. 多左转车道,自车通常以平滑跟随车道的方式转向,但人类转弯轨迹往往随意性较大,需注意从自车外侧快速内切或从内侧意图弯道超车的社会车辆,避免在过弯期间发生别蹭。

4. 车辆汇流时,侧后方快速来车是人类视野盲区,当自车从辅路汇入主路、从主路切至辅路,以及从匝道直接汇入主路车流的场景,需通过后视镜或侧后窗关注后方来车,确保汇流安全。

此外,面对部分复杂路口和特殊地段,可能会超出智驾能力上限,这时系统为了保证行车安全而请求驾驶员接管的情况。
停车场内
1. 停车位内部或周边存在传感器难以探测的物体,尤其是悬空物体(例如消防箱、车辆后备胎、货车车尾)、特殊形状障碍物(例如尖角障碍物、异形障碍物)等,避免被突出物剐蹭。

2. 车位在台阶上或陡坡中的场景,对车辆控制的稳定性可能存在挑战,需多留意车辆上下台阶 / 陡坡的加速度。

3. 代客泊车在经过路口时,由于停车场常存在视野盲区,建议您提前留意,做好防御性措施。

极限场景
1.天气、光线条件恶劣,或地面存在破损、低矮障碍物等,超出传感器硬件工作范围,需要及时接管。
-
在雨、雪、雾霾等能见度较低,和迎面出现强光、眩光的恶劣天气场景。
-
遇到限宽墩、施工区域旁散落的砖头、倒地和弯折的护栏等低矮突出障碍物。
-
地面坑洞、水洼、陡降等道路问题。

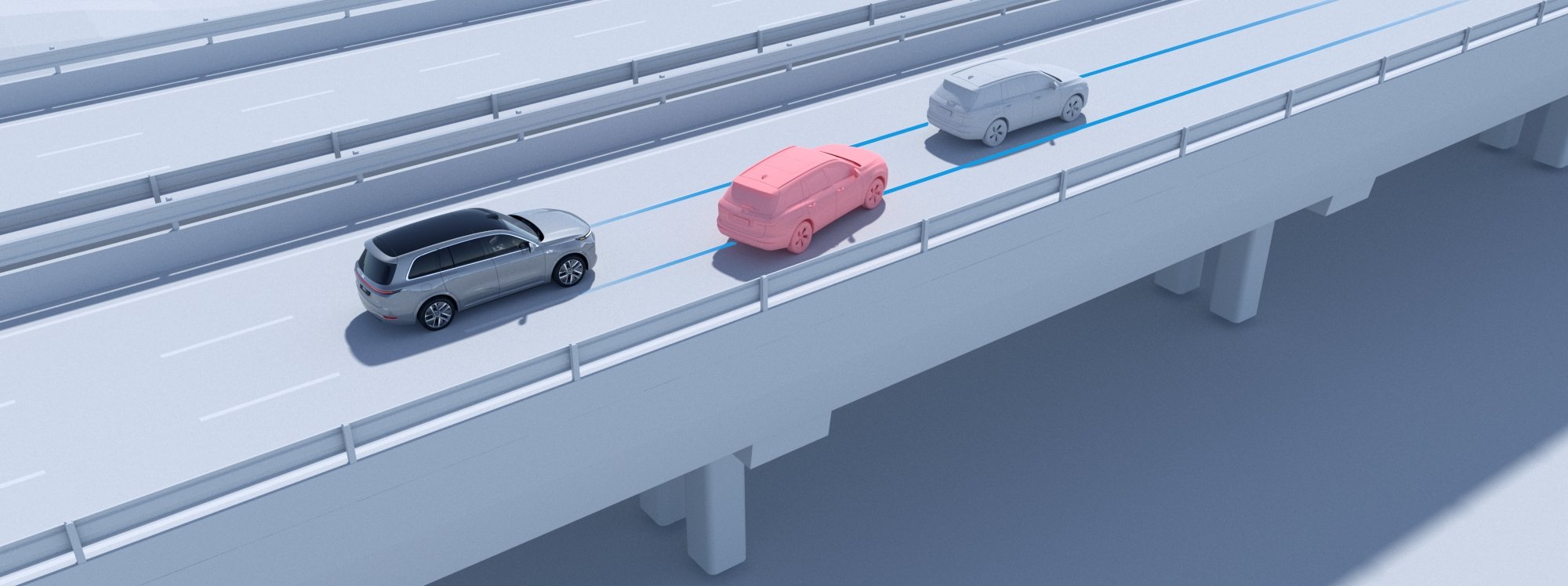
2. 遇到鲁莽激进、异常驾驶的社会车辆,和突然出现的两、三轮车,建议您提前预警避让。
-
面对前车近距离强行加塞、大车缓慢切入、多车道转弯旁车斜插的场景。
-
面对前方车道内出现人不在车上的静止自行车、摩托车场景。
-
行人、骑行人、电动车等交通参与者,在路口、豁口等视觉盲区突然出现的场景。
-
出现逆行、斜插等违章行驶车辆的场景。
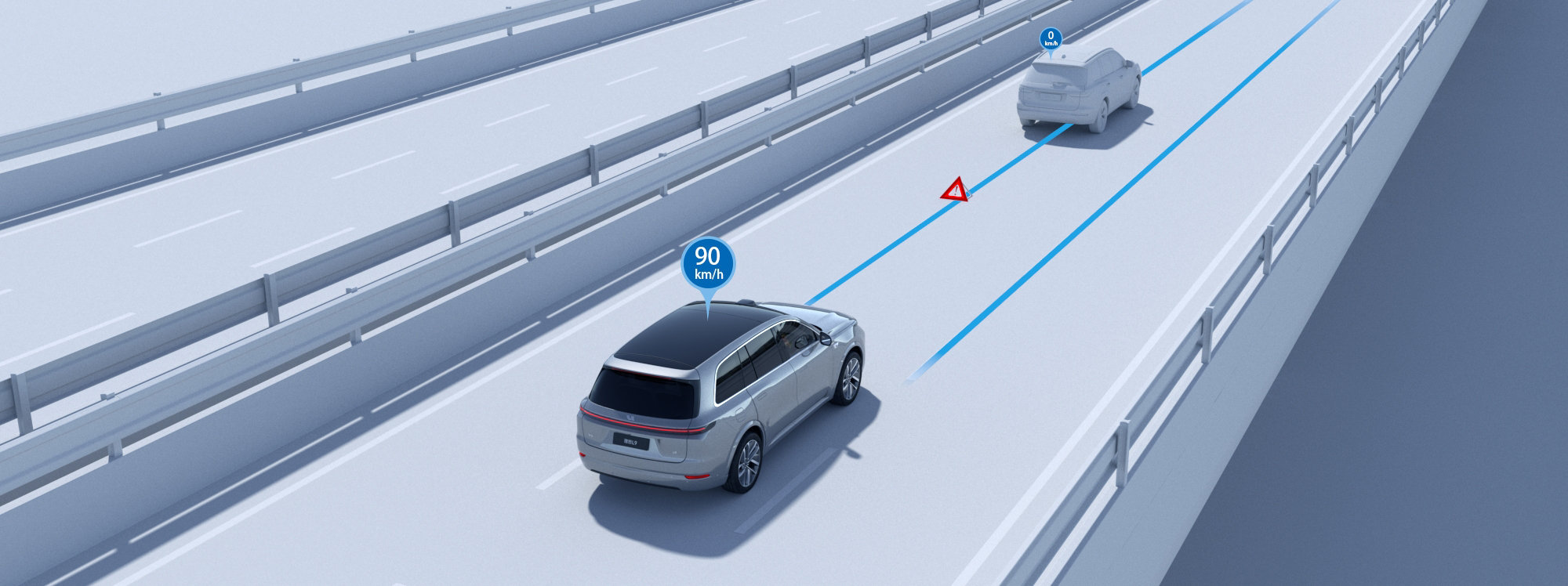
3. 当前方出现事故、前车急刹时,建议尽早充分接管避开,预防碰撞的同时避免后车追尾。
-
高速上前车急刹车,系统 100% 的制动力仍无法满足避撞的场景。
-
高速上突然遇到静止在车道上的事故车,尤其是车辆因碰撞事故导致车尾损坏、或车头方向偏斜、车身横跨多车道等场景。
4. 停车场里若遇到特殊车位情况,不妨换一个车位使用,提高泊车安全。
-
当车位附近存在凹陷、路面缺失时。
-
机械立体停车位,泊车系统暂不支持泊入。
-
过窄的车位空间、车位旁有堆放的尖条等废弃物时。

 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏






