“8颗摄像头搞定所有”,马斯克一直这样布道特斯拉的 FSD 传感器方案。
但布道归布道、愿景归愿景,现实是现有方案撑不住 FSD,情况又有了新变化 ——
最新曝光的特斯拉文件,据称还是特斯拉中国的内部文件,其中信息显示:特斯拉将会采用新一代硬件传感器方案,匹配新一代特斯拉自动驾驶算力基础 HW4.0。

核心变化主要涉及两方面:
第一,原先前置 3 个摄像头,变成了 2 个,但分辨率提高。
第二,之前官宣抛弃的毫米波雷达,又加了回来。
而且这套新方案适配的特斯拉车型,可能率先在中国工厂生产。
什么样的方案?
曝出的新方案,主要有两个变化。
首先,是安装在前挡的前视摄像头,由三目变成了双目。
少了一个摄像头,但分辨率和视场角都提高了。据说有 500 万像素,而且自带防 LED 爆闪功能。

同时 B 柱 / 尾门 / 内后视镜饰盖处 / 侧翼摄像头均更换为同样的高分辨率产品。
而在摄像头模块上,增添了加热以及风扇等自清洁装置。
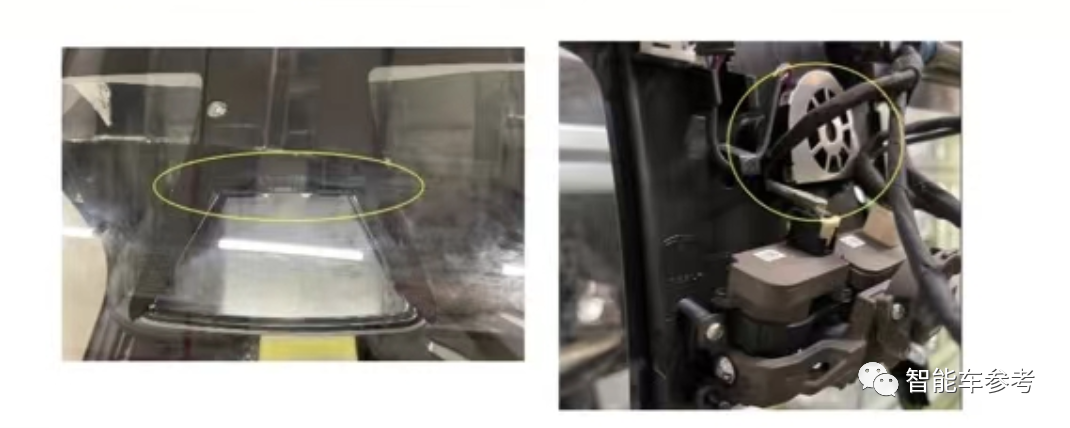
第二个重大变化,是之前被马斯克抛弃的唯一一个毫米波雷达,也要装回来。
曝料还明确指出,这就是 HW 4.0 方案配置,主要服务于 FSD。
如果为真,意味着特斯拉要靠 7 个摄像头 + 1 个毫米波雷达,实现马斯克口中“安全性猛增 300%”。
这次曝料之所以引起国内外广泛关注,是因为流出源的性质,并非无据可考的”知情人士”。而是一张煞有介事的特斯拉中国“内部文件”截图。

从文字描述来看,这份文件更像是产线变更后指导质检工人作业的说明。
这可能也说明,新传感器方案的特斯拉车型,相关生产准备已经就绪了。
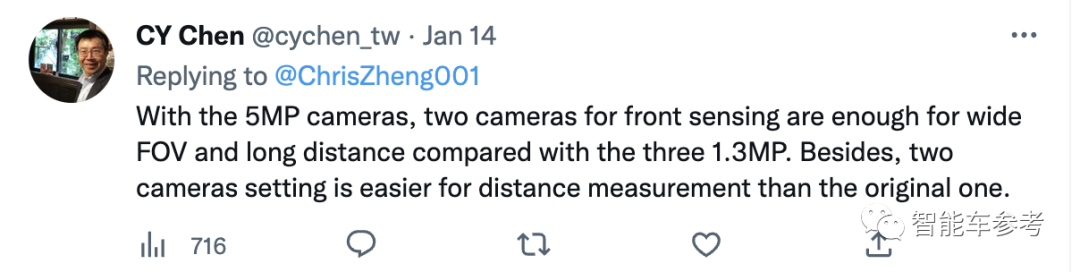
下一代 FSD 的传感器方案被曝出,网友的看法认为,双目摄像头其实比三目能更利于测量距离,属于回归本质的改进:
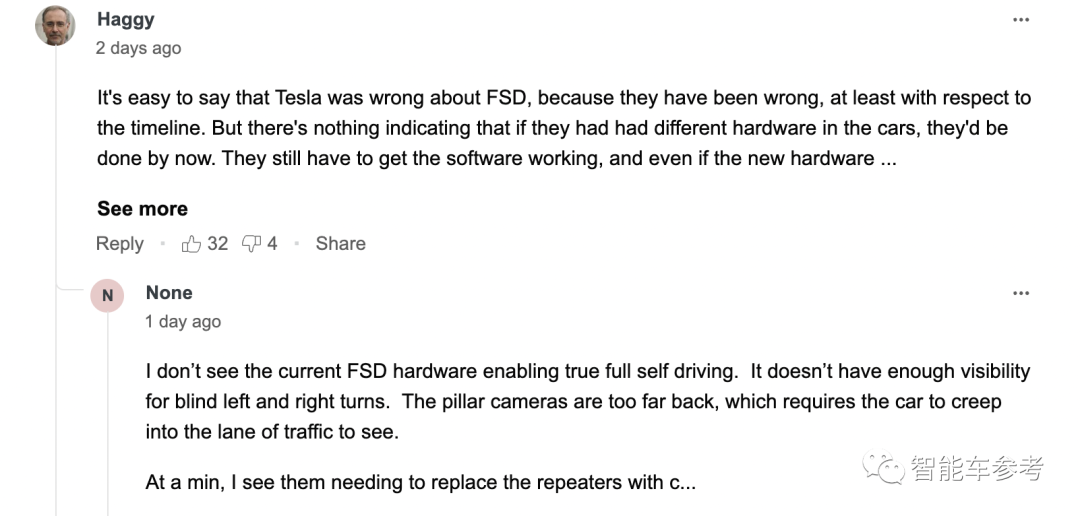
但是也有人质疑这样的硬件层面改动,并不能对 FSD 的表现有显著提升,软件的问题才是马斯克最需要解决的:
当然了,也有人不相信。结合特斯拉涨价、补贴退坡等等负面因素,这样的信息可能只是分散大家注意力的手段:

你怎么看?
HW4.0,会有哪些不同?
如果下一代特斯拉真的变成 7 摄像头 + 1 毫米波雷达的方案,对于自动驾驶功能体验,以及技术研发会带来什么样的变化?
目前特斯拉的前置摄像头 130 万像素,全车换成换成 500 万像素摄像头,带来的最大变化是系统捕捉到的图像更清晰,在数据层面上给决策系统提供了更详实的依据。
具体来说,是 500 万像素产品,其 SNR(信噪比)和 HDR(高动态范围)比原先的 130 万像素摄像头高得多。

SNR 即信噪比,指放大器的输出信号的功率,与同时输出的噪声功率的比值,常常用分贝数表示。
设备的信噪比越高表明它产生的“杂音”越少。对于来说,信噪比越大,说明混在图像信号里的无用噪点信息越小,数据质量越高,否则相反。
HDR 是描述描述摄像头拍摄明暗对比比较强烈的场景时的识别能力,可以狭义理解为拍摄明暗对比场景时抑制过曝和改善曝光不足的能力。
500 万像素摄像头,使图像数据的“含金量”更高,同时也让目标识别变得更加容易。理论上讲能够提升 FSD 的能力上限。
但就像有网友指出的,硬件是基础,最终的疗效,还要看 FSD 软件研发的进度。

此外,摄像头自带的加热清洁系统,毫无疑问会让 FSD 在恶劣天气下表现更好,也是为系统能力下限兜底的措施。
而换装 500 万摄像头,一个必然的结果就是系统数据处理负担的增加。
这也是为何这套系统被认为是 HW 4.0 的匹配方案。
HW 4.0 我们曾介绍过【链接】,底层算力芯片特斯拉自研,台积电 7nm 制程,算力 216TOPS,是目前方案的 3 倍。这也说明,看似减掉一个摄像头,但实际上新方案对于环境的感知能力和系统计算需求,都有显著提升。
而最值得关注的一个点,也许是那个被默默“请回来”的毫米波雷达。
对不起,雷达减错了
新 HW 4.0,很可能已经方案定型量产在即。
固然可以看成是特斯拉更加迈向“纯视觉”核心的一步:摄像头上去量求精,还给予了更大的算力支持。
但 HW 4.0 表现出的另一个重要特质,是马斯克从“纯视觉原教旨主义”,“不声张”地转向 ——
曾经众目睽睽之下被马斯克扔进垃圾堆的毫米波雷达,又装回来了。
融合感知的方案,在下一代特斯拉自动驾驶方案中,可能还是主导。
没有毫米波雷达的特斯拉,满打满算也就在北美地区卖了一年左右,现在成了“绝版”。
为啥要取消?马斯克早就说过:尽可能使用少的传感器,一方面可以降低成本,另一方面能够减少数据融合和处理的挑战。
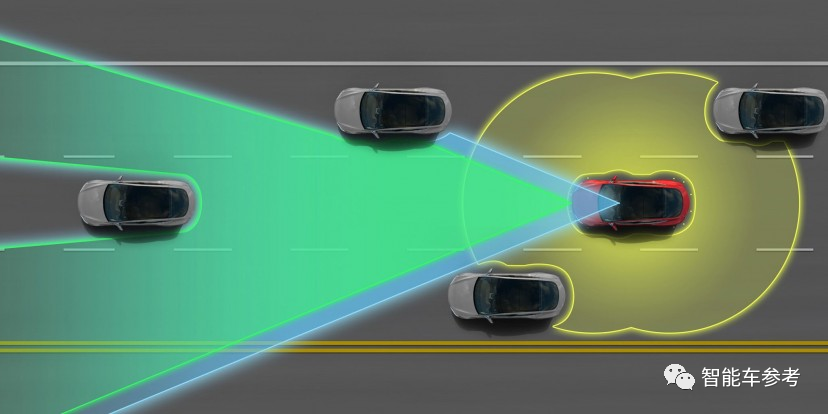
毫米波雷达的原理,是过无线电波的技术,即便在能见度差的情况下也能检测快速接近的物体,是安全冗余的重要组成之一。
在 RoboTaxi 或高等级自动驾驶中,激光雷达 + 毫米波雷达 + 摄像头,缺一不可。
不过雷达也有缺点,会增加车载计算机处理的数据量,对计算能力和多传感器数据融合,提出新挑战。
所以,马斯克的信条是,人能靠视觉开车,AI 一定也可以。因为图像本身就包含驾驶所需要的一切信息。

只不过这样,自动驾驶的成败关键,用户的使用体验,甚至生命财产安全,全系于算法一身,即使可靠性做到小数点背后好几个 9,以特斯拉的销量基数,依然不是万无一失。
而特斯拉取消毫米波雷达的糟糕后果,也很快显现了出来。
2021 年底开始,8 摄像头版特斯拉北美开售,但随着它的上市,特斯拉投诉量在短期内激增 3000%,绝大部分是关于“幽灵刹车”的问题。
幽灵刹车的本质,其实就是前向识别失误,错把阴影、塑料袋等不影响驾驶的目标,错认成了汽车、行人等等。
这恰好是毫米波雷达最重要的冗余作用。
根据之前曝光的文件,和特斯拉关联公司、项目的蛛丝马迹,特斯拉极大概率在自研一款新的毫米波雷达。
区别于传统脉冲雷达,特斯拉这款更像是 FMCW 雷达,即调频连续波雷达。有人推测这是一款高分辨率的 4D 成像雷达(增加高度数据)。

而马斯克的说法,也悄然发生了转变:
并非完全否定毫米波雷达,“高分辨率的毫米波雷达”胜过纯视觉。
相比 3D 雷达,4D 雷达的确可以获得更多数据,从而提供给决策规划更多可依赖的信息。
然而如果 HW4.0 中毫米波雷达真的回归,对于马斯克和特斯拉的影响才刚刚开始。
一方面,是否意味着 100% 纯视觉现阶段还走不通?无法应对城市城区开放场景路况?
另一方面,一旦特斯拉的自动驾驶传感器方案还要更改,那之前已经交付卖出的 200 万辆车,是否意味着无法 OTA 升级到最新 FSD 能力?那些已经提前预购了 FSD 能力的车主,又该如何交代?
本文来自微信公众号:智能车参考 (ID:AI4Auto),作者:有据无车
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏






